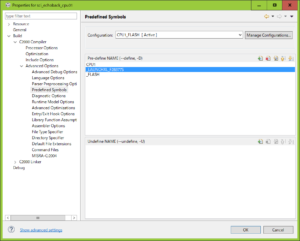
DelfinoでDMAを使用したADCを行ってみました。
adc_soc_continuous_dma_cpu01サンプルを利用しています。http://www.ti.com/lit/ds/symlink/tms320f28374s.pdf
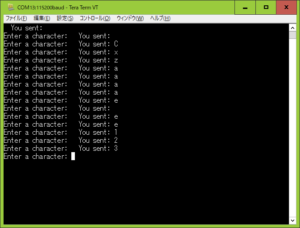
以下にサンプルプログラムがあります。
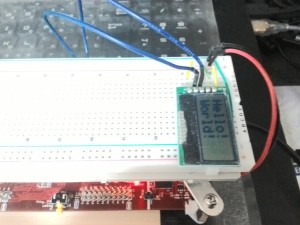
I2Cを使用できるようにしました。I2CのLCDで試しました。http://akizukidenshi.com/catalog/g/gP-06669/ http://akizukidenshi.com/catalog/g/gK-06795/
TI C2000 Piccolo LaunchPadのステッピングモーターにボタンを追加しました。
MS1とMS2はプルアップされているので 無結線だとEighth stepです。HHの設定は、低速でもとてもスムースですが、LLの設定では、カクカク感が半端ないです。各設定での違いが分かった面白いです。
© 2014 Spineedge Corporation.
投稿ナビゲーション
組込み技術向上のため、エンベデッドに関する話題中心のブログです。










{kind=link}