電源を交換し、3D Printerは、復旧しました。
以下の電源で使用しました。
CURE(キュア) 安定化電源 スイッチング電源 AC DC コンバーター 24V 10A 240W 超薄型 直流電源変換器 過負荷保護 自動冷却 日本語説明書付 安全保護回路 自動リセット可能 電源装置
https://www.amazon.co.jp/gp/product/B08LP5H8Q9/ref=ppx_yo_dt_b_asin_title_o05_s00?ie=UTF8&psc=1
3000円程度ですが、本体の値段を考えると痛い出費です。
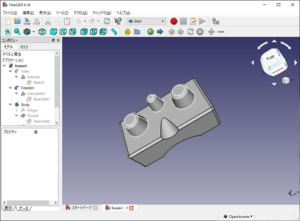
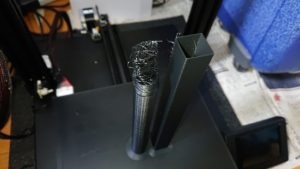
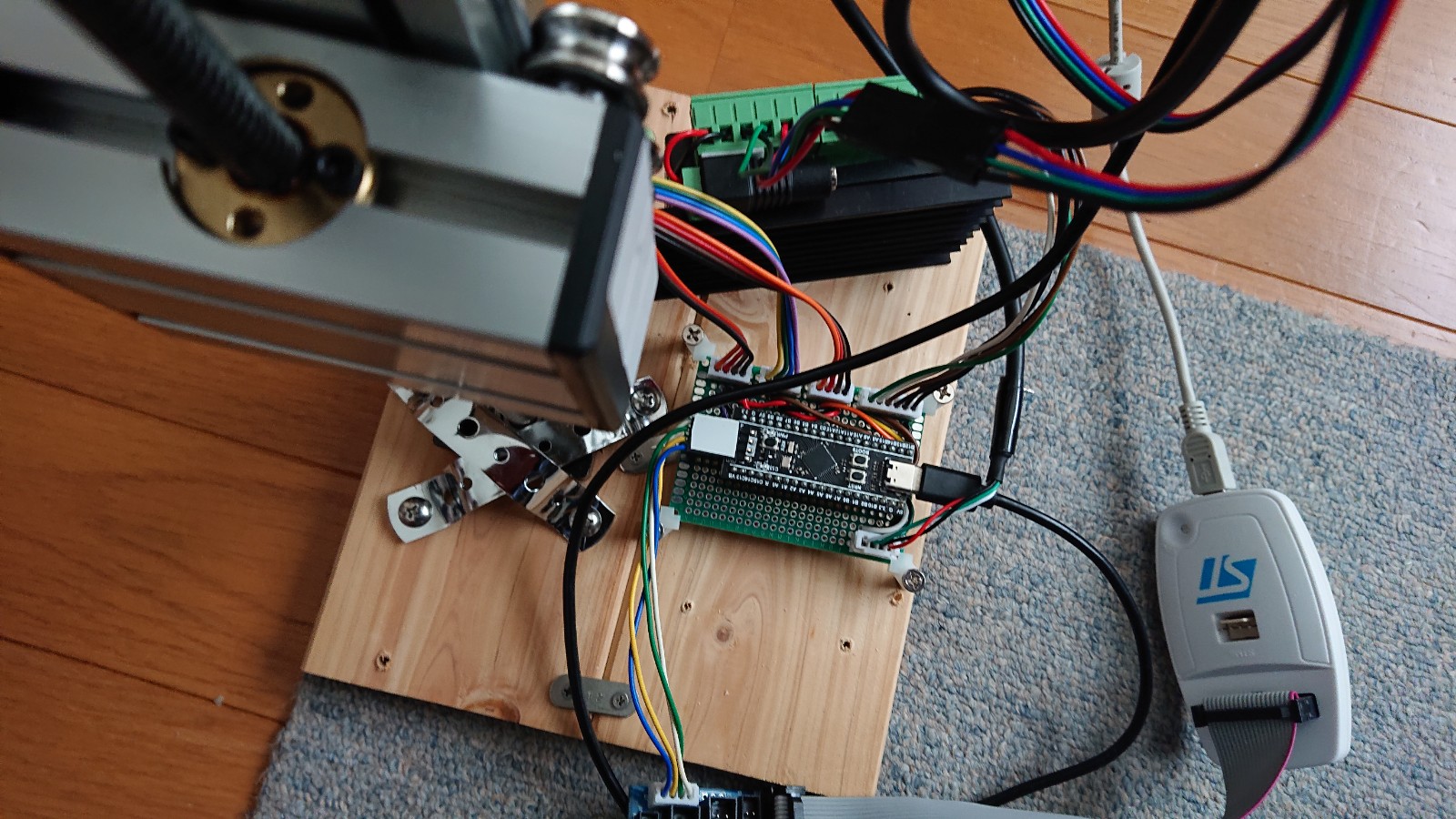
3D Printerのプチアップグレードを行いました。スクレーパホルダー、LED照明とZロッドベアリングホルダー、を追加しました。部品は、もちろん、3Dプリンタで作成しています。
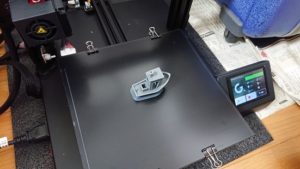
 スクレーパを置く場所がなかったので設置しました。
スクレーパを置く場所がなかったので設置しました。

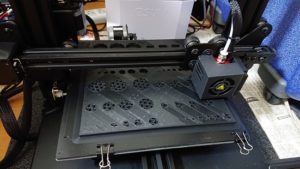
LED照明は、プラットフォームが暗いので付けました。
ルートアール 12灯 USB LED バーライト スイッチ付き 昼光色 RL-BAR12D
https://www.amazon.co.jp/gp/product/B075V5R4HC/ref=ppx_yo_dt_b_asin_title_o06_s00?ie=UTF8&psc=1

Creasee CS-20には、Zロッドベアリングホルダーがついていますが、ベアリングがついていませんでした。
ベアリングは持っていた608Zを使用しました。

キャップも作りました。LED照明のケーブルホルダーも兼ねています。

取っても追加しました。格好良くなりました。
I replaced the power supply and the 3D Printer was restored.
I used it with the following power supplies.
CURE Stabilized power supply Switching power supply AC DC converter 24V 10A 240W Ultra-thin DC power supply converter Overload protection Automatic cooling With Japanese manual Safety protection circuit Automatic resettable power supply
https://www.amazon.co.jp/gp/product/B08LP5H8Q9/ref=ppx_yo_dt_b_asin_title_o05_s00?ie=UTF8&psc=1
It’s about 3000 yen, but it’s a painful expense considering the price of the main unit.
We have made a small upgrade to the 3D Printer. Added scraper holder, LED lighting and Z rod bearing holder. Of course, the parts are created with a 3D printer.
I installed it because there was no place to put the scraper.
I added LED lighting because the platform is dark.
Root Earl 12 lights USB LED bar light with switch Daylight color RL-BAR12D
https://www.amazon.co.jp/gp/product/B075V5R4HC/ref=ppx_yo_dt_b_asin_title_o06_s00?ie=UTF8&psc=1
The Creasee CS-20 had a Z rod bearing holder, but no bearings.
I used the 608Z bearing I had.
I also made a cap. It also serves as a cable holder for LED lighting.
I added it even if I took it. It looks better.
我更换了电源,并恢复了3D打印机。 我将其与以下电源一起使用。 CURE稳定电源开关电源AC DC转换器24V 10A 240W超薄DC电源转换器过载保护自动冷却带日文手册安全保护电路自动复位电源装置
https://www.amazon.co.jp/gp/product/B08LP5H8Q9/ref=ppx_yo_dt_b_asin_title_o05_s00?ie=UTF8&psc=1
大约3000日元,但是考虑到主机的价格,这是一个痛苦的支出。 我们对3D打印机进行了小规模升级。增加了刮刀架,LED照明和Z杆轴承架。当然,零件是使用3D打印机创建的。 我安装它是因为没有地方放置刮板。 我添加了LED照明,因为平台是黑暗的。 根伯爵12灯USB LED条形灯带开关日光色RL-BAR12D
https://www.amazon.co.jp/gp/product/B075V5R4HC/ref=ppx_yo_dt_b_asin_title_o06_s00?ie=UTF8&psc=1
Creasee CS-20具有Z杆轴承座,但没有轴承。 我使用的轴承是608Z。 我也做了一个上限。它还可用作LED照明的电缆固定器。 即使添加了它,我也添加了它。看起来更好。