ステッピングモータの制御を試作するためにリニアアクチュエータを購入しました。
リニアスライドレール、アルミ合金0808ボールねじ57モーター付き単軸台形(500mm)
https://www.amazon.co.jp/gp/product/B081B4BFYP/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1
実物は、ボールねじではりません。台形ねじです。500mmという大型ですが格安なので購入しました。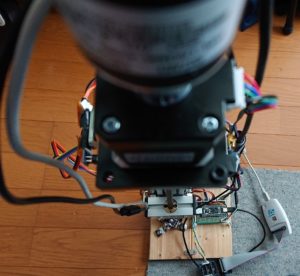
ドライバは、以下を購入しました。
Quimat 4A TB6600 ステッピング モーター ドライバー コントローラー 9V-40V CNC単軸 2位相4位相(4/6/8線) 駆動工具 ドライバー QD07
https://www.amazon.co.jp/gp/product/B06XSBB45M/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1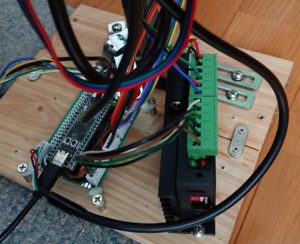
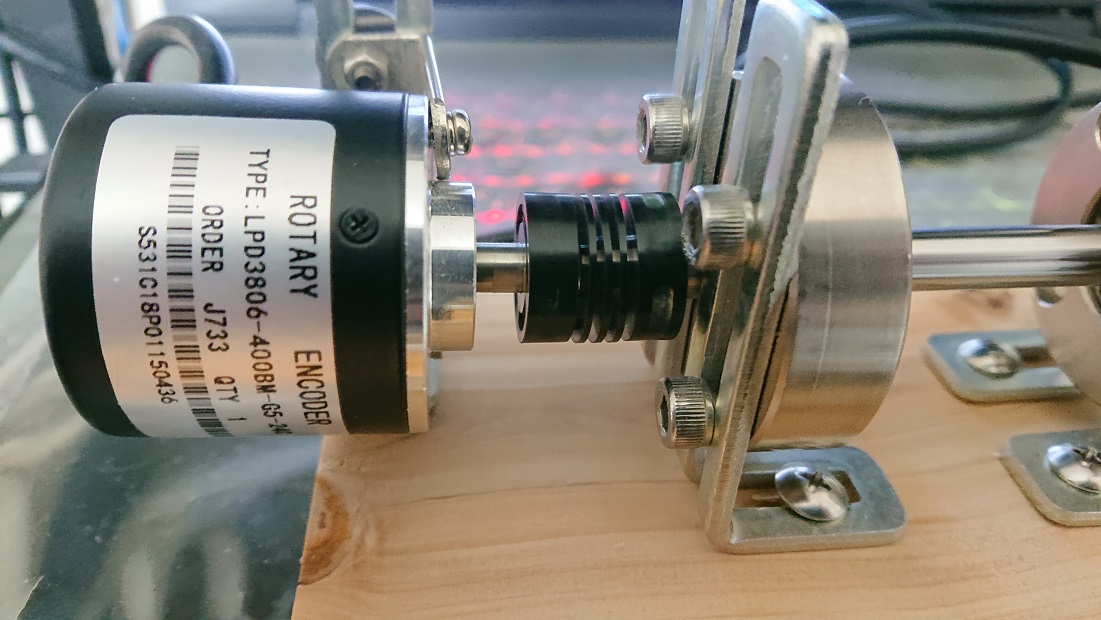
モータは、ロータリーエンコーダを接続するためにデュアルシャフトの物に交換しています。
HANPOSE 17HS8401S-D150Sダブルシャフト48mm Nema 17ステッピングモーター42モーター42BYGH 1.8A 52N.cm 4線式3DプリンターCNCレーザー
https://jp.banggood.com/HANPOSE-17HS8401S-D150S-Double-Shaft-48mm-Nema-17-Stepper-Motor-42-Motor-42BYGH-1_8A-52N_cm-4-lead-for-3D-Printer-CNC-Laser-p-1415966.html?rmmds=myorder&cur_warehouse=CN
アクチュエータのリミットセンサとして反射型の光電センサを使用しました。
HiLetgo 10pcs TCRT5000赤外線反射センサーIR光電スイッチバリアライン障害物回避モジュールトレースセンサートレースモジュール
https://www.amazon.co.jp/gp/product/B07WR9JP3W/ref=ppx_yo_dt_b_asin_title_o07_s00?ie=UTF8&psc=1
センサーは、上側リミット、下側リミット、原点近傍の3個を使用しました。
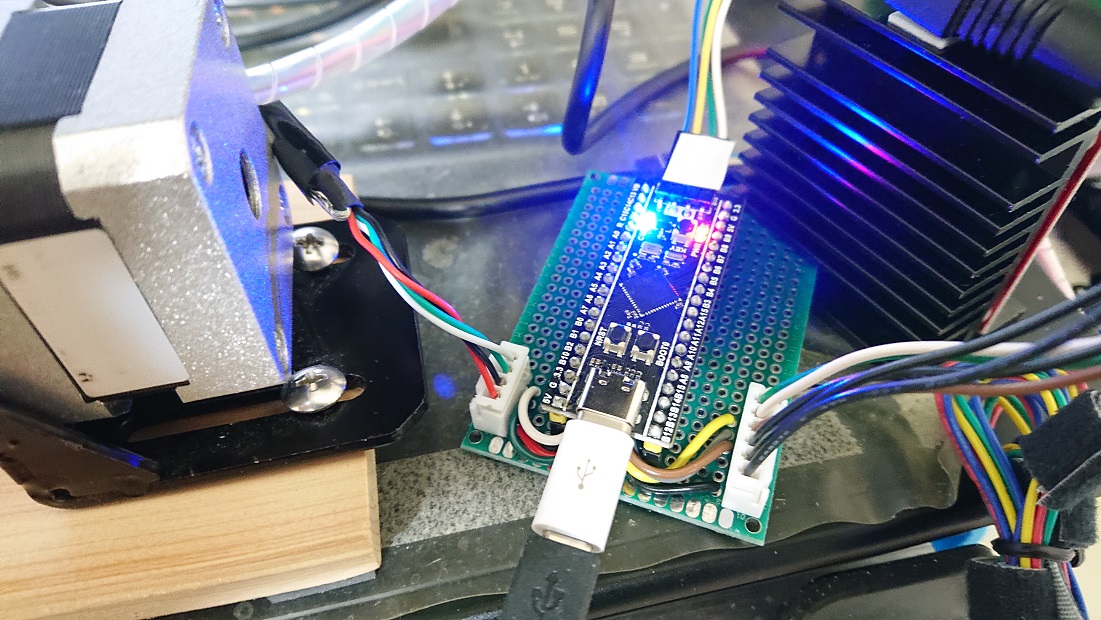
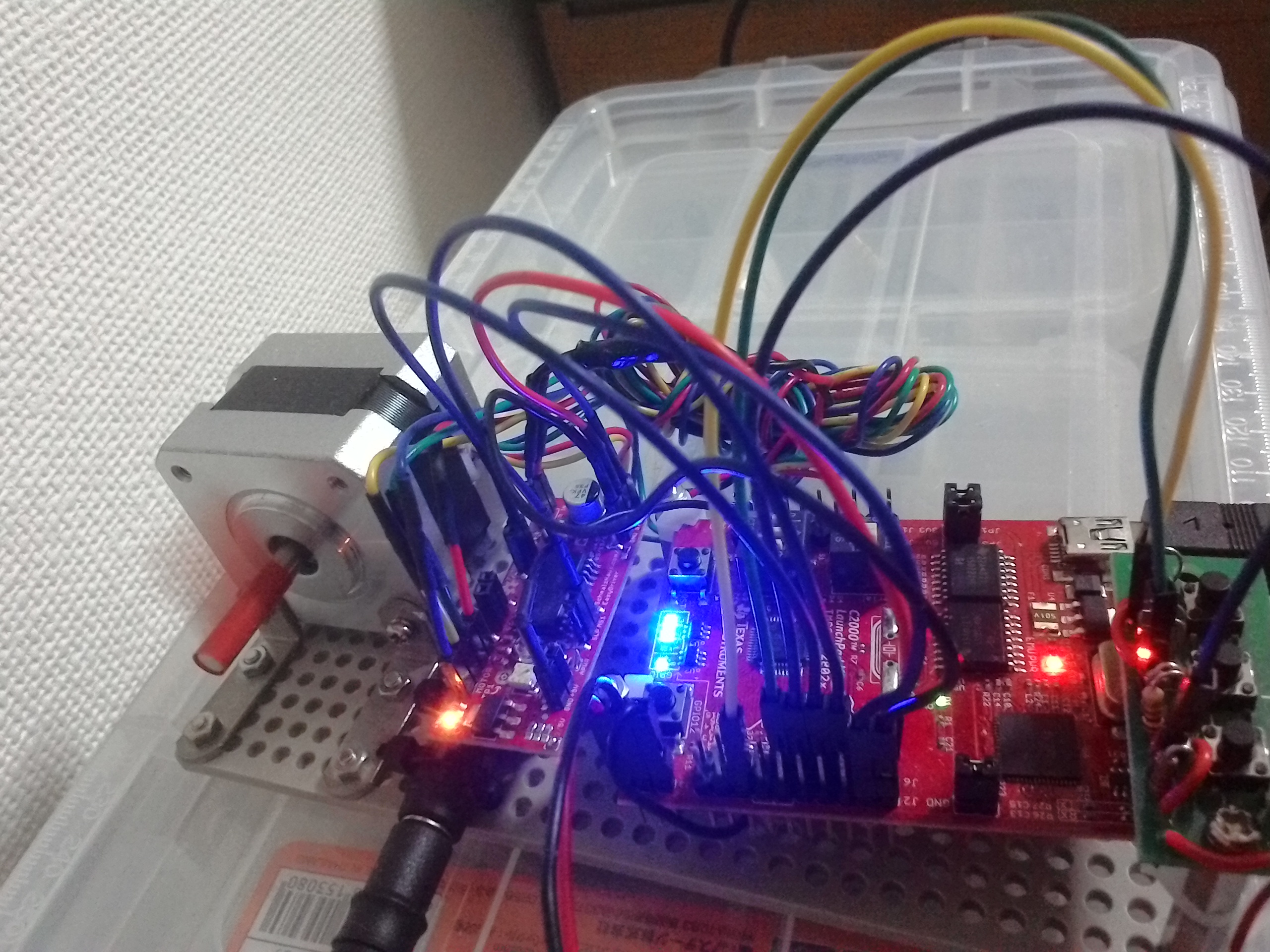
制御には、STM32F401CCU6を使用しました。
STM32F401開発ボードSTM32F401CCU6 STM32F4学習ボード
https://jp.banggood.com/STM32F401-Development-Board-STM32F401CCU6-STM32F4-Learning-Board-p-1568897.html?rmmds=myorder&cur_warehouse=CN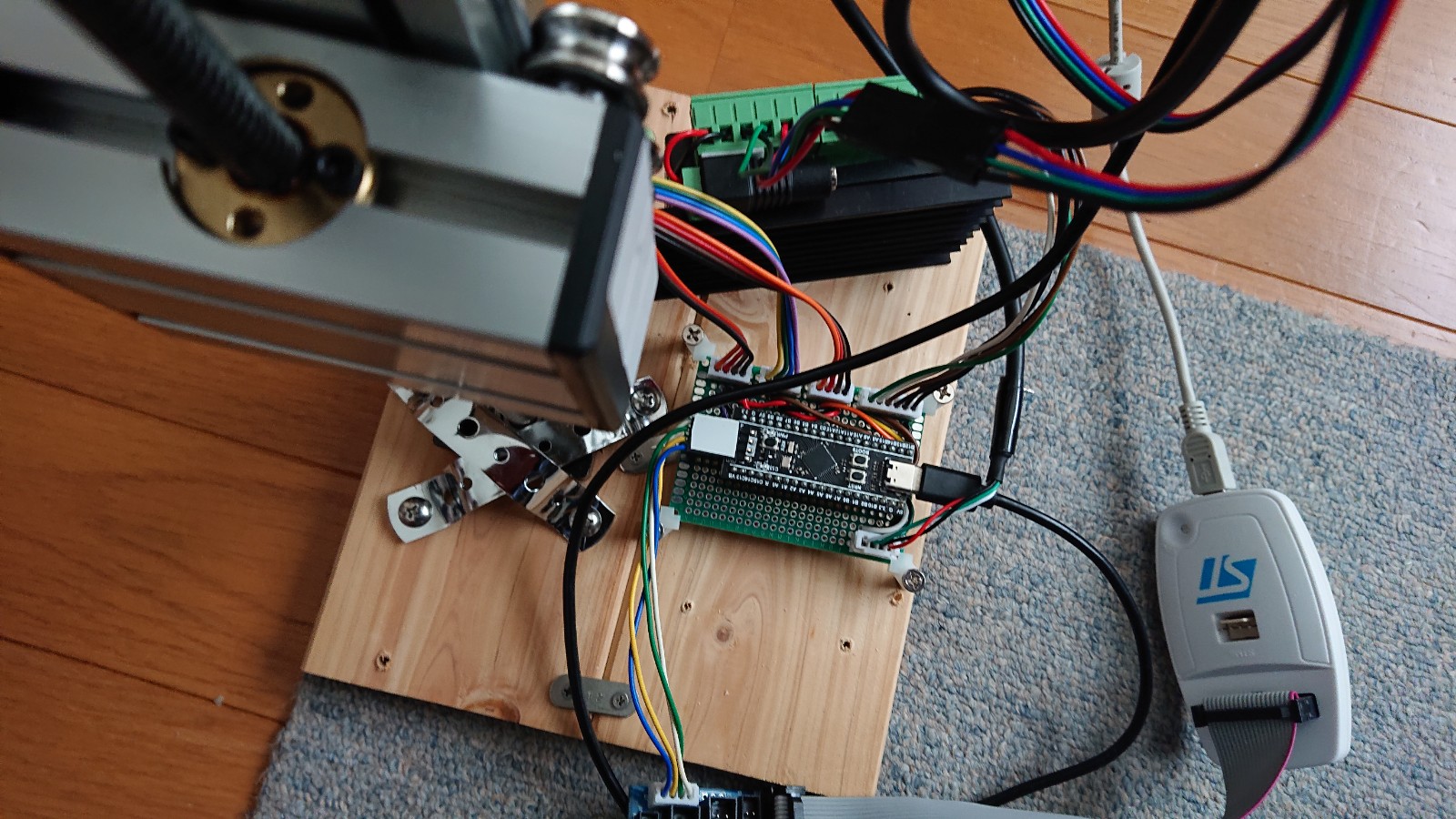
I bought a linear actuator to make a prototype control of a stepping motor.
Linear slide rail, aluminum alloy 0808 Ball screw 57 Single shaft trapezoid with motor (500 mm)
https://www.amazon.co.jp/gp/product/B081B4BFYP/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1
The real thing is not a ball screw. It is a trapezoidal screw. I bought it because it is a large size of 500mm but it is cheap.
The driver purchased the following:
Quimat 4A TB6600 Stepping Motor Driver Controller 9V-40V CNC Single Axis 2 Phase 4 Phase (4/6/8 Wire) Drive Tool Driver QD07
https://www.amazon.co.jp/gp/product/B06XSBB45M/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1
The motor is replaced with a dual shaft one to connect the rotary encoder.
HANPOSE 17HS8401S-D150S Double Shaft 48mm Nema 17 Stepping Motor 42 Motor 42BYGH 1.8A 52N.cm 4-Wire 3D Printer CNC Laser
https://jp.banggood.com/HANPOSE-17HS8401S-D150S-Double-Shaft-48mm-Nema-17-Stepper-Motor-42-Motor-42BYGH-1_8A-52N_cm-4-lead-for-3D-Printer-CNC-Laser-p-1415966.html?rmmds=myorder&cur_warehouse=CN
A reflective photoelectric sensor was used as the limit sensor of the actuator.
HiLetgo 10pcs TCRT5000 Infrared Reflection Sensor IR Photoelectric Switch Barrier Line Obstacle Avoidance Module Trace Sensor Trace Module
https://www.amazon.co.jp/gp/product/B07WR9JP3W/ref=ppx_yo_dt_b_asin_title_o07_s00?ie=UTF8&psc=1
Three sensors were used: the upper limit, the lower limit, and the vicinity of the origin.
STM32F401CCU6 was used for control.
STM32F401 development board STM32F401CCU6 STM32F4 learning board
https://jp.banggood.com/STM32F401-Development-Board-STM32F401CCU6-STM32F4-Learning-Board-p-1568897.html?rmmds=myorder&cur_warehouse=CN
我购买了线性执行器,以对步进电动机的控制进行原型设计。
线性滑轨,铝合金0808滚珠丝杠57带电机的单轴梯形(500mm)
https://www.amazon.co.jp/gp/product/B081B4BFYP/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1
真正的东西不是滚珠丝杠。 这是一个梯形螺钉。 我买了它是因为它最大可达500毫米,但价格便宜。
驱动程序购买了以下内容:
Quimat 4A TB6600步进电机驱动器控制器9V-40V CNC单轴2相4相(4/6/8线)驱动工具驱动器QD07
https://www.amazon.co.jp/gp/product/B06XSBB45M/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1
用双轴马达代替电动机来连接旋转编码器。
HANPOSE 17HS8401S-D150S双轴48mm Nema 17步进电机42电机42BYGH 1.8A 52N.cm 4线3D打印机CNC激光
https://jp.banggood.com/HANPOSE-17HS8401S-D150S-Double-Shaft-48mm-Nema-17-Stepper-Motor-42-Motor-42BYGH-1_8A-52N_cm-4-lead-for-3D-Printer-CNC-Laser-p-1415966.html?rmmds=myorder&cur_warehouse=CN
反射型光电传感器用作致动器的极限传感器。
HiLetgo 10pcs TCRT5000红外反射传感器红外光电开关障碍物避障模块跟踪传感器跟踪模块
https://www.amazon.co.jp/gp/product/B07WR9JP3W/ref=ppx_yo_dt_b_asin_title_o07_s00?ie=UTF8&psc=1
使用了三个传感器:上限,下限和原点附近。
STM32F401CCU6用于控制。
STM32F401开发板STM32F401CCU6 STM32F4学习板
STM32F401開発ボードSTM32F401CCU6 STM32F4学習ボード
https://jp.banggood.com/STM32F401-Development-Board-STM32F401CCU6-STM32F4-Learning-Board-p-1568897.html?rmmds=myorder&cur_warehouse=CN