Ububtuが起動出来たら、LINUXのインストール方法を
Development Environment Setup on Linux
http://docs.zephyrproject.org/getting_started/installation_linux.html#installation-linux
Ubuntu 16.04 LTS 64-bit
を使用した手順でZephyrをインストールします。
まず、Ubuntuをアップグレードします。
$ sudo apt-get update
$ sudo apt-get upgrade
次に開発環境をインストールする。
$ sudo apt-get install –no-install-recommends git cmake ninja-build gperf \
ccache doxygen dfu-util device-tree-compiler \
python3-ply python3-pip python3-setuptools xz-utils file
CMakeのバージョンが3.8.2+ より高い必要があります。以下の
手順でバージョンの確認をします。
$ mkdir $HOME/cmake && cd $HOME/cmake
$ wget https://cmake.org/files/v3.8/cmake-3.8.2-Linux-x86_64.sh
$ yes | sh cmake-3.8.2-Linux-x86_64.sh | cat
$ echo “export PATH=$PWD/cmake-3.8.2-Linux-x86_64/bin:\$PATH” >> $HOME/.zephyrrc
$ source <zephyr git clone location>/zephyr-env.sh
$ cmake –version
次にZephyr Software Development Kitをインストールします。
まずダウンロードします。 Zephyr SDK archiveにダウンロード可能なアーカイブが確認できます。
wget https://github.com/zephyrproject-rtos/meta-zephyr-sdk/releases/download/0.9.2/zephyr-sdk-0.9.2-setup.run
$ sh zephyr-sdk-0.9.2-setup.run
を実行してzephyr-sdkをインストールします。
インストール後、
$ export ZEPHYR_GCC_VARIANT=zephyr
$ export ZEPHYR_SDK_INSTALL_DIR=/opt/zephyr-sdk
※ /opt/zephyr-sdkこの部分は、インストールディレクトリです。
デフォルトがこのディレクトリです。
次にソースコードをインストールします。
$ git clone https://github.com/zephyrproject-rtos/zephyr.git
次にソースをインストールしたフォルダに移動します。
$ cd zephyr
プロジェクト環境変数を設定します。
$ source zephyr-env.sh
次に必要なpythonライブラリをインストールします。
$ pip3 install –user -r scripts/requirements.txt
サンプルプログラムのフォルダに移動します。
cd $ZEPHYR_BASE/samples/hello_world
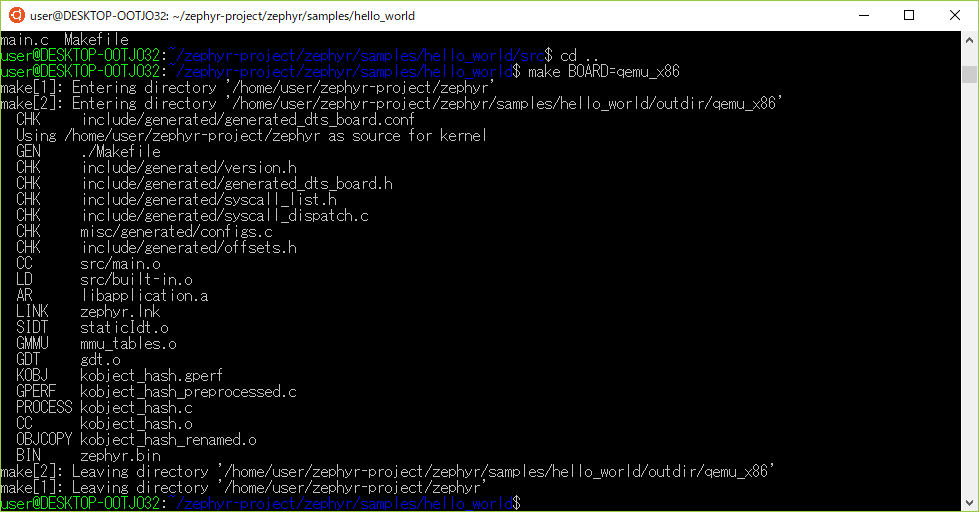
まずは、qemu向けのビルドをします。
$ make BOARD=qemu_x86
エラーが出なければ成功です。
$ make BOARD=qemu_x86 run
エミュレータ上で実行されます。
Hello Zephyr! Hello World! x86
が表示されました。

以下にサンプルの記載があります。
http://docs.zephyrproject.org/samples/hello_world/README.html