

RISC-VのLongan Nanoにデバッガを使ってみました。
https://www.seeedstudio.com/Sipeed-USB-JTAG-TTL-RISC-V-Debugger-p-2910.html
PlatformIO IDEでデバッガを使いました。使い方は下のURLにあります。
https://docs.platformio.org/en/latest/plus/debug-tools/sipeed-rv-debugger.html
デバッグモードで起動したところです。main関数の先頭で停止します。

実行、停止、ステップ実行もできます。
デモプログラムをデバッグしているところです。

これで開発効率が上がります。
STM32F401CCU6 STEPPING MOTOR CONTROL1
STM32F401CCU6開発ボードでSTEPPING MOTORを動かします。まずは、Rotary Encoderを計測してみました。
Encoderの読み込みには、TIM3を使用しました。
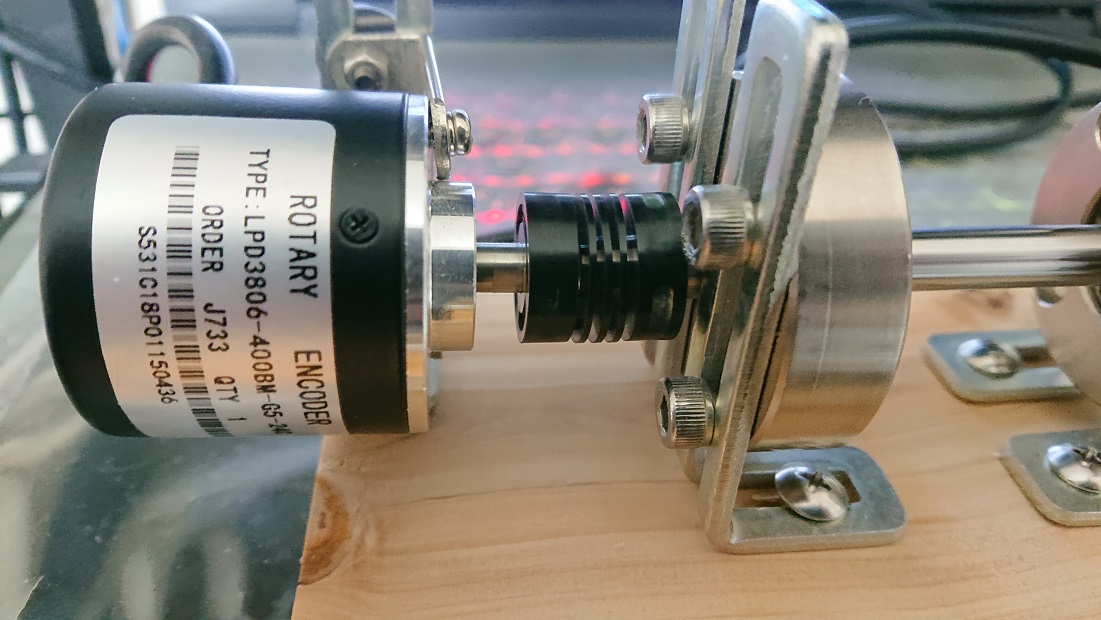
エンコーダー 元 AB 相 5-24v 400 パルス 増分の光学式ロータリーエンコーダー 本体サイズ 39 * 35.5 mm NPN 出力
https://www.amazon.co.jp/%E3%82%A8%E3%83%B3%E3%82%B3%E3%83%BC%E3%83%80%E3%83%BC-5-24v-%E5%A2%97%E5%88%86%E3%81%AE%E5%85%89%E5%AD%A6%E5%BC%8F%E3%83%AD%E3%83%BC%E3%82%BF%E3%83%AA%E3%83%BC%E3%82%A8%E3%83%B3%E3%82%B3%E3%83%BC%E3%83%80%E3%83%BC-%E6%9C%AC%E4%BD%93%E3%82%B5%E3%82%A4%E3%82%BA-35-5/dp/B076Q5W251
MXの機能で「Encoder Mode」を設定すれば、コードを自動生成してくれます。
STM32F401CCU6は、USBも使用できるのでCDCでEncoder値を取り出せます。USB CDCもMXでコードの自動生成ができます。
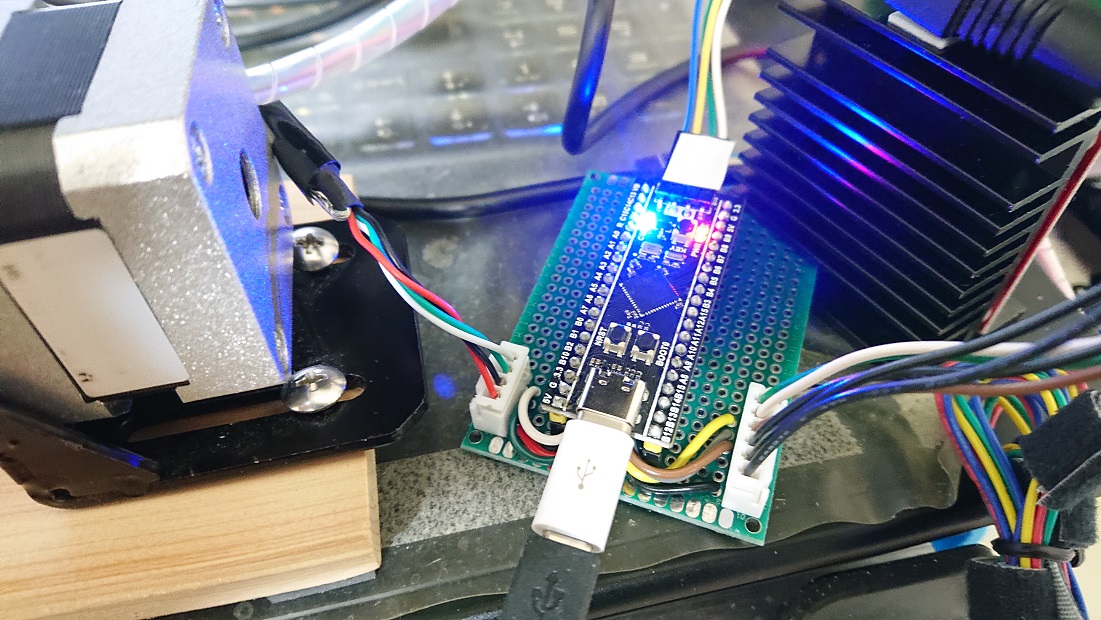
STM32F401CCU6は、小さいですが高機能です。ピン数が少ないので、大きなシステムは組めませんが、単機能であれば十分な性能を生かすことができます。

STM32F051C8T6 PWM

PWMを試しました。LEDの輝度変更で確認しました。
STM32CubeIDEを使用しているのでSTM32CubeMXでコード生成が行えます。PWMは、TIM2を使用しました。設定方法さえわかればかなり簡単に実現できます。開発環境の重要性がわかります。
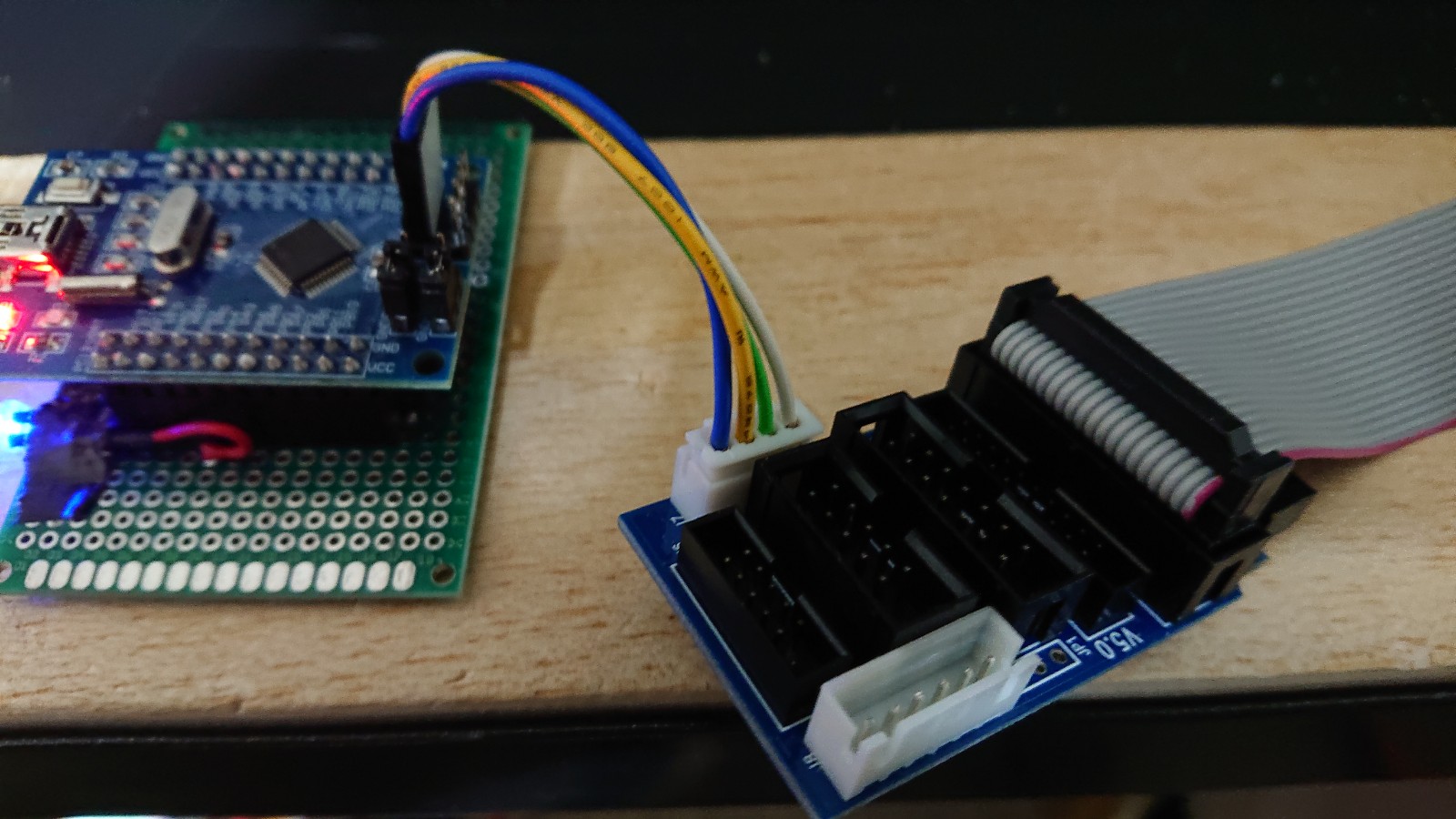

デバッグは、ST-LINK/V2で行っています。
STM32 Development Small Boards
海外通販サイトから小型のSTM32開発ボードを取り寄せました。
https://jp.banggood.com/ARM-Cortex-M0-STM32F051C8T6-STM32-Core-Board-Minimum-Development-Board-p-1316132.html?rmmds=mywishlist&cur_warehouse=CN
https://jp.banggood.com/STM32F401-Development-Board-STM32F401CCU6-STM32F4-Learning-Board-p-1568897.html?rmmds=myorder&cur_warehouse=CN
STM32F401CCU6とSTM32F051C8T6です。

STM32F401CCU6は、Cortex-M4、84MHz、FLASH 256kB、RAM 64kBの小型高性能のマイコンです。
https://www.stmcu.jp/stm32/stm32f4/stm32f401/12214/
STM32F051C8T6は、Cortex-M0、48MHz、FLASH 64kB、RAM 8kBの小規模マイコンです。
https://www.stmcu.jp/stm32/stm32f0/stm32f0x1/11868/
STM32CubeIDEで開発予定です。
NUCLEO-F303K8

https://www.st.com/ja/evaluation-tools/nucleo-f303k8.html
NUCLEO-F303K8です。チップワンストップで購入しました。送料無料にするためのついで買いです。
https://www.chip1stop.com/view/dispDetail/DispDetail?partId=STMI-0102441
STM32F303K8T6 Arm Cortex-M4 32-bit CPU with FPU 、72MHz、64kBフラッシュメモリのマイコンです。

小ピン高性能の分野の使用を考えています。STM32の開発の一環です。これもmbedでなくSTM32CubeIDEで開発予定です。
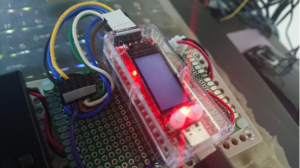
STM32F103 WITH LCD
格安のSTM32F103C8T6ボードでLCD表示です。
開発環境は、STM32CubeIDEを使用しました。デバッガもST-LINKの格安コピー品です。
LCDは、3.3V動作LCDキャラクタディスプレイモジュール 16×2行 バックライト付白抜きを使用しました。
http://akizukidenshi.com/catalog/g/gP-04794/
STM32CubeIDEは、コードが自動生成でき、FreeRTOSの使用も選択できます。
Raspberry Pi mini monitor
Raspberry Pi用の小型モニターを用意しました。
https://www.amazon.co.jp/gp/product/B0819PJYRN/ref=ppx_yo_dt_b_asin_image_o04_s00?ie=UTF8&psc=1
7インチHDMI入力でタッチ操作は、USB入力です。解像度は、1024×600です。
タッチ操作がUSB入力なのでマウスとして動くのでドライバは不要です。Windows10 IoT Coreでも使用するつもりです。

HDMIケーブルとUSBケーブルがついています。
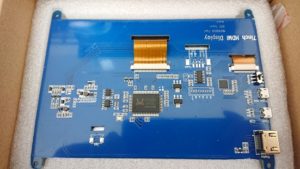
電源は、USBマイクロBで供給です。HDMIからも供給できます。

組み立て式の簡易的なディスプレイケースがついています。
Raspberry Piの固定用の穴がついていますので
モニターと一体に固定も可能です。
Raspberry PI4 B+

Raspberry Pi4 B+ 4GBを購入しました。
Black Friday でAmazonで購入しました。
https://www.amazon.co.jp/gp/product/B07YZ1JSGM/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1
ケース、ファン、ヒートシンク、HDMIケーブル2本、電源アダプタ、64GB マイクロSD、メモリリーダ、ドライバがついて通常価格¥14,999 のところ3000円安い¥11,999で購入しました。



64GBのSDカードは、SunDisk製なところが評価できます。
ノーブラウンドの粗悪品でなくてよかったです。メモリリーダ、ドライバは、不要といえば不要です。

表は、部品がたくさんあります。電源USBは、Type Cに変更されています。HDMIは、マイクロになり2つに増えています。USBは、2ポートが2.0、2ポートが3.0になっています。

裏は、マイクロSDカードコネクタがあります。
マイクロSDカードには、NOOBSシステムがプリインストールされていますがOSは、Rasbianだけを使用するので消す予定です。
Longan Nano Board2
Longan Nanoの開発には、PlatformIOを使用します。
文書関係は、以下のサイトにあります。
https://www.seeedstudio.com/Sipeed-Longan-Nano-RISC-V-GD32VF103CBT6-Development-Board-p-4205.html
以下に開発方法が書かれています。
http://longan.sipeed.com/en/
中文の方が情報が多いいです。
http://longan.sipeed.com/zh/
以下にVS CODEにプラグインをインストールする方法やデバイスの設定方法があります。手順通りに進めればOKです。
http://longan.sipeed.com/en/get_started/pio.html
次にLED Blinkのサンプルプログラムを作ります。
これも以下のサイトの手順通り進めます。
http://longan.sipeed.com/en/get_started/blink.html
ビルドするとfirmware.binができます。
書き込みには、USB DFU のツールを使用します。
以下にツールとUSBのドライバがありまs。
http://dl.sipeed.com/LONGAN/Nano/Tools/GD32_MCU_Dfu_Tool_V3.8.1.5784_1.rar
インストール方法は、以下の項に詳しく書かれています。
http://longan.sipeed.com/en/get_started/blink.html#usb-dfu-download
インストール後、GD32 MCU Dfu Tool.exeでbinファイルをダウンロードします。ツールにLongan Nano Boardを認識させるためには、BOOTボタンを押しながら、RESETボタンを押します。

接続するとDFU Devideに「GD DFU DEVICE 1」が表示されます。
Openしてbinファイルを選択し「OK」押すと書き込みが開始されます。
書き込み後RESETボタンを押すと書き込んだプログラムが走り出します。
Longan Nano Board
RISC-Vボードを購入しました。
Sipeed Longan Nano RISC-V GD32VF103CBT6開発ボード
http://akizukidenshi.com/catalog/g/gK-14678/
CPU:GD32VF103CBT6
メモリ:128KB Flash/32KB SRAM
RISC-V 32bitのGigaDeviceのCPU、GD32VF103CBT6を搭載しています。自分的には、STM32に続く中華対応です。
GigaDeviceは、中国の半導体会社です。
https://www.gigadevice.com/
160×80ドット、0.96インチのフルカラーIPS液晶とケースがついて830円なのでかなりの格安セットです。


