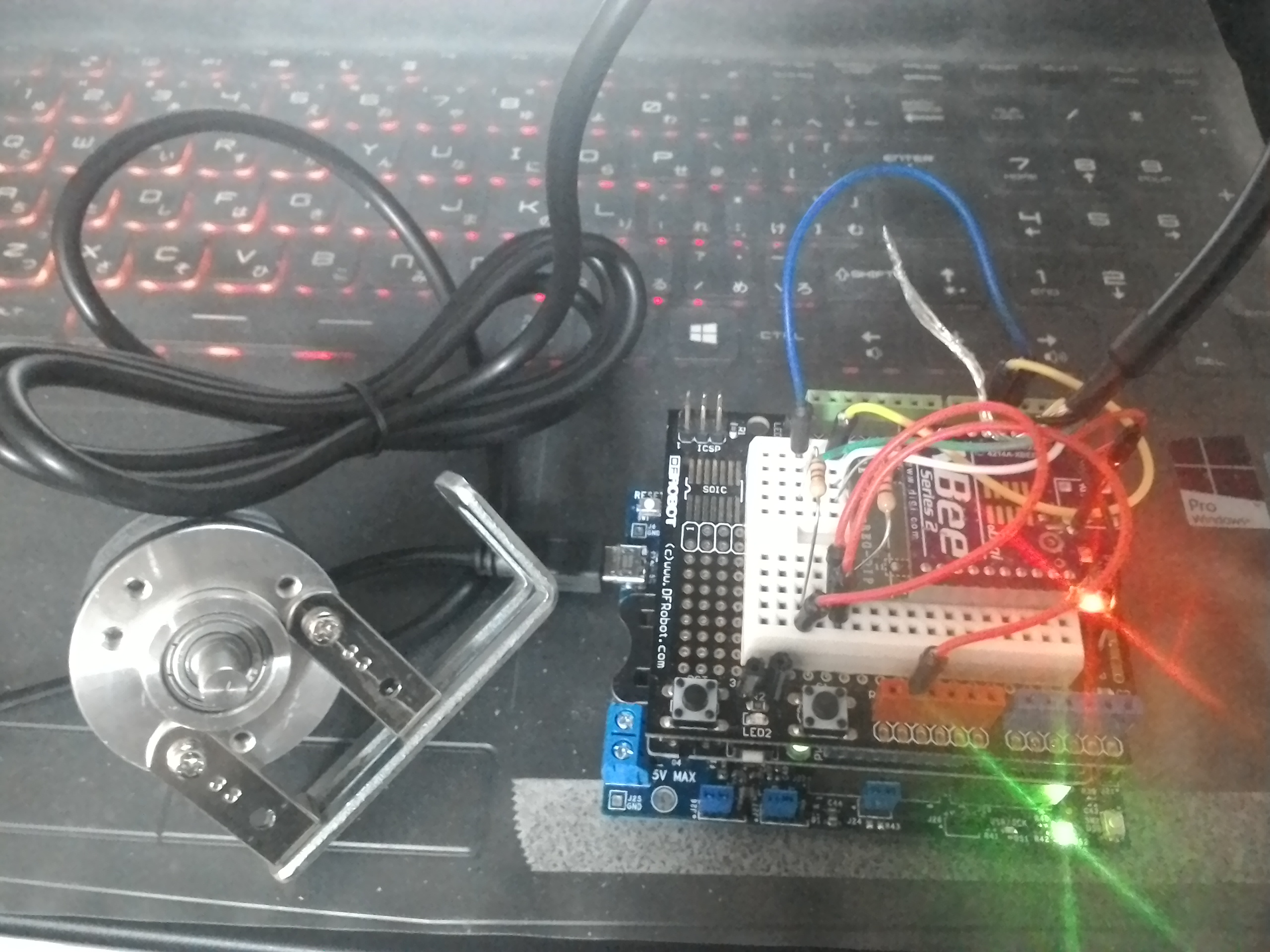
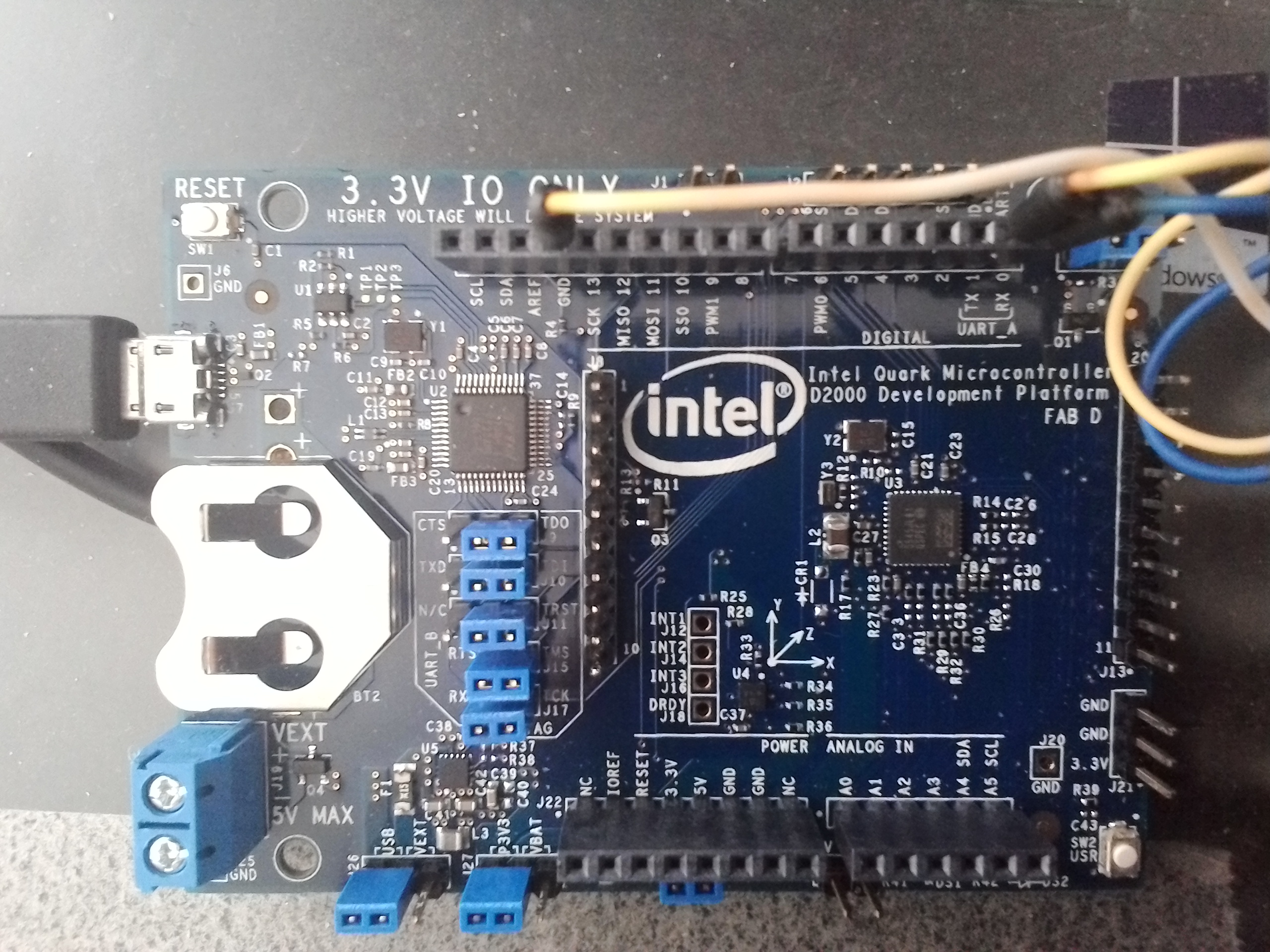
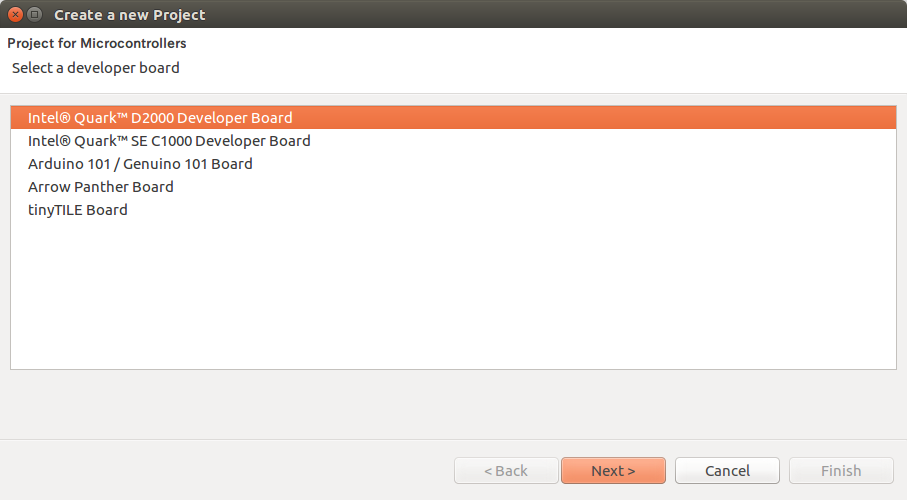
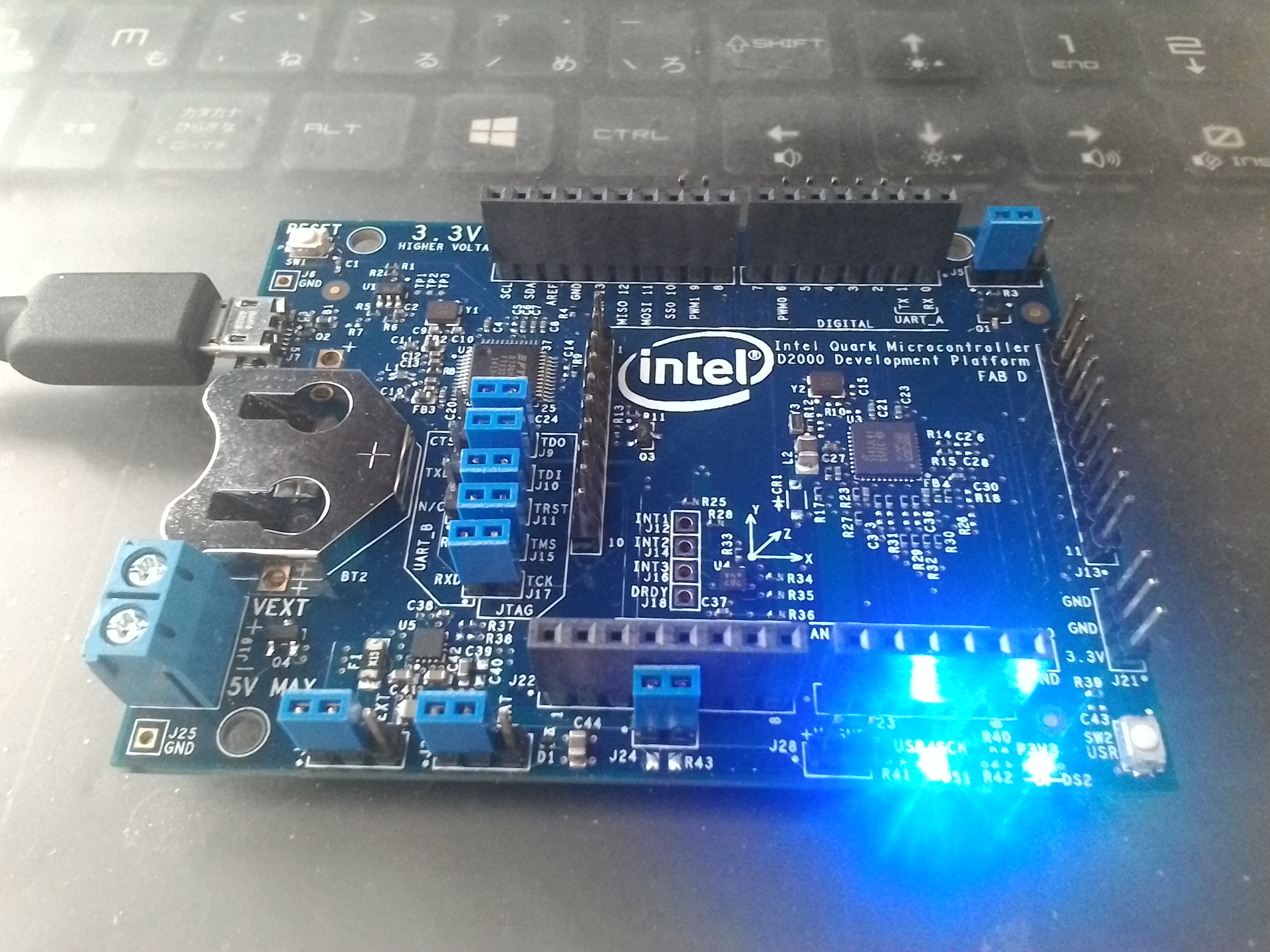
D2000でステッピングモータを回しました。
バイポーラ ステッピングモーター4SM-42BYG011
http://akizukidenshi.com/catalog/g/gP-05372/
SparkFun ROB-12779 EasyDriver ステッピングモータドライバ
https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=EEHD-4YRY
EasyDriver – Stepper Motor Driver
https://www.sparkfun.com/products/12779
ドライバIC A3967を使用しているのでパルス出力と方向出力のみでステッピングモータを回すことができます。
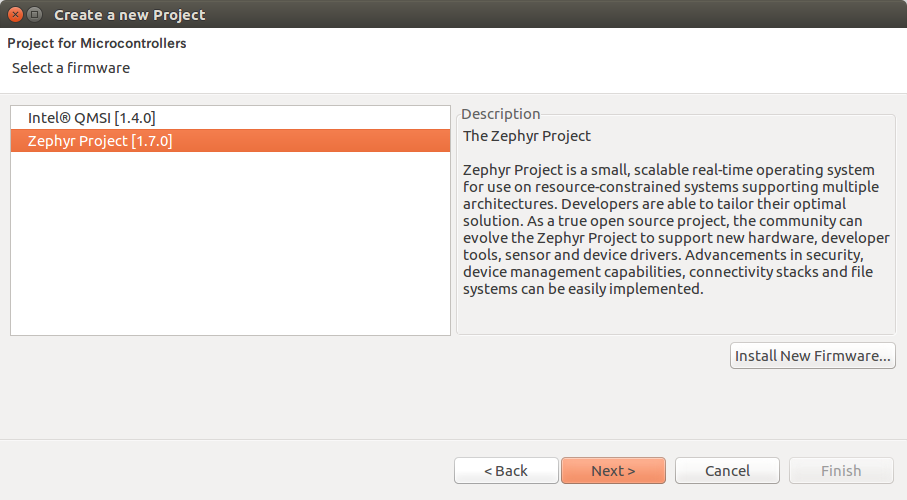
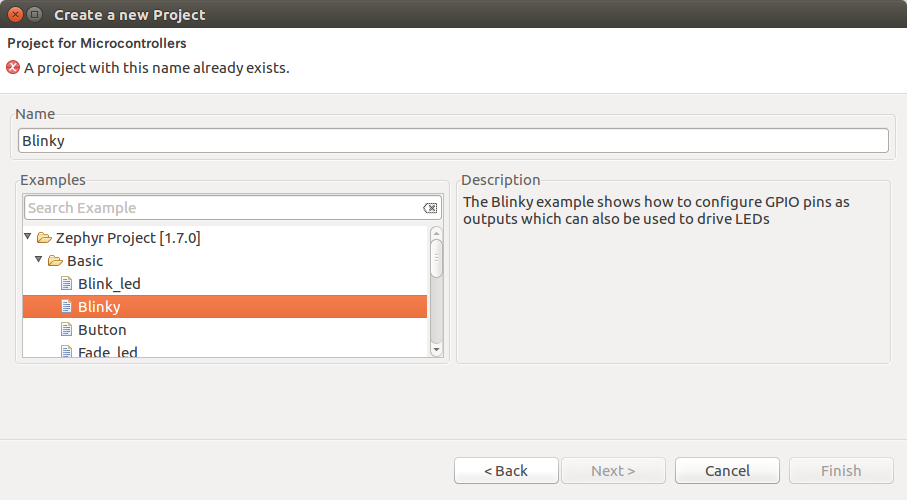
ZephyrのPWMのサンプルは、”PWM_0″を対象にしています。
PWM_0は、JTAGピンと競合しているため使用できません。PWM_1を使用するようにしました。
ピンの機能割付けを行いました。
struct device *pinmux = device_get_binding(PINMUX_NAME);
PWM1_PIN(24ピン)を機能C(PWM)に設定します。
if (pinmux_pin_set(pinmux, PWM1_PIN, PINMUX_FUNC_C)) {
これでPWM_1側が使えるようになります。
電源は、DC12Vを使用しています。
65W級スイッチングACアダプター12V5A GF65I-US1250
http://akizukidenshi.com/catalog/g/gM-00510/
D200ボードには12Vから三端子レギュレータで作成したDC5Vを入力しています。
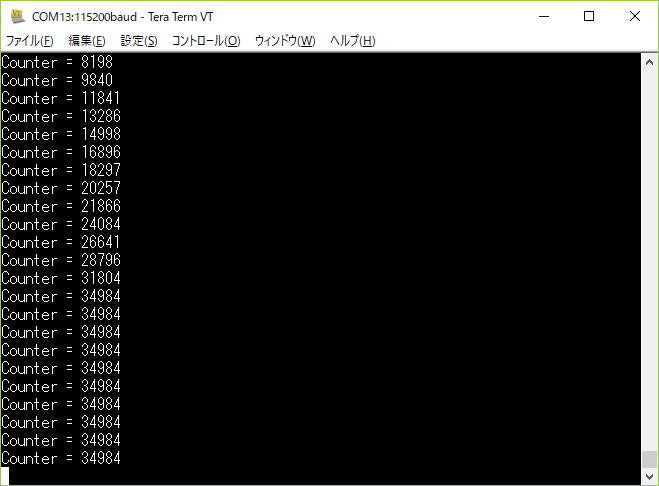
エンコーダカウントが1秒間6400カウントに調整しました。一周1600カウントなので1秒4周です。240rpmで回したことになります。
サンプルプログラムは以下にあります。
https://github.com/jendo1969/d2000/blob/master/Step_motor/src/main.c