
Zephyr OSでサンプルを動かします。ISSMを起動し、
Project for Micro controllersで新しいプロジェクトを作ります。
Select a developer boardで 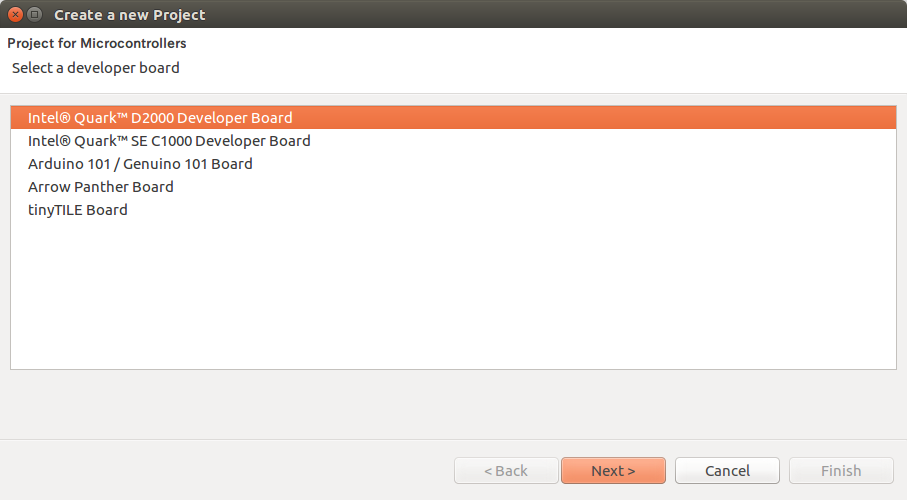
Intel Quark D2000 Developer Boardを選択します。
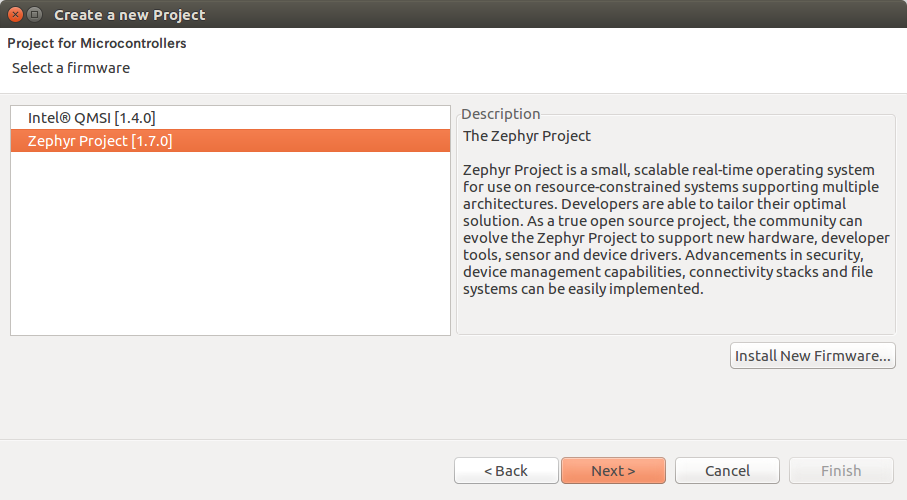
次にSelect firmwareで
Zephyr Project「[1.7.0]
を選択します。
Select a platform configuration画面はそのまま進めます。

次にサンプルを選択します。
ここでBasicのBlinkyを選択します。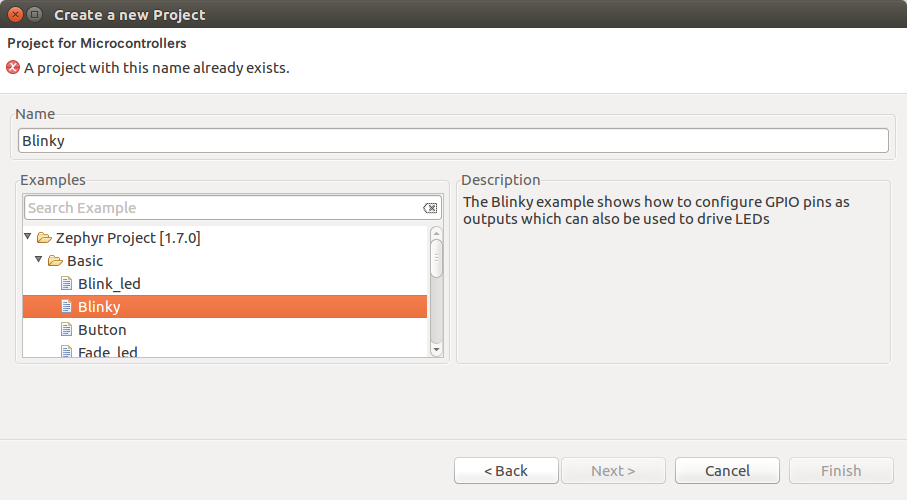
BuildしてデバッグするとD2000のボード上のLEDが1秒間隔で点滅します。
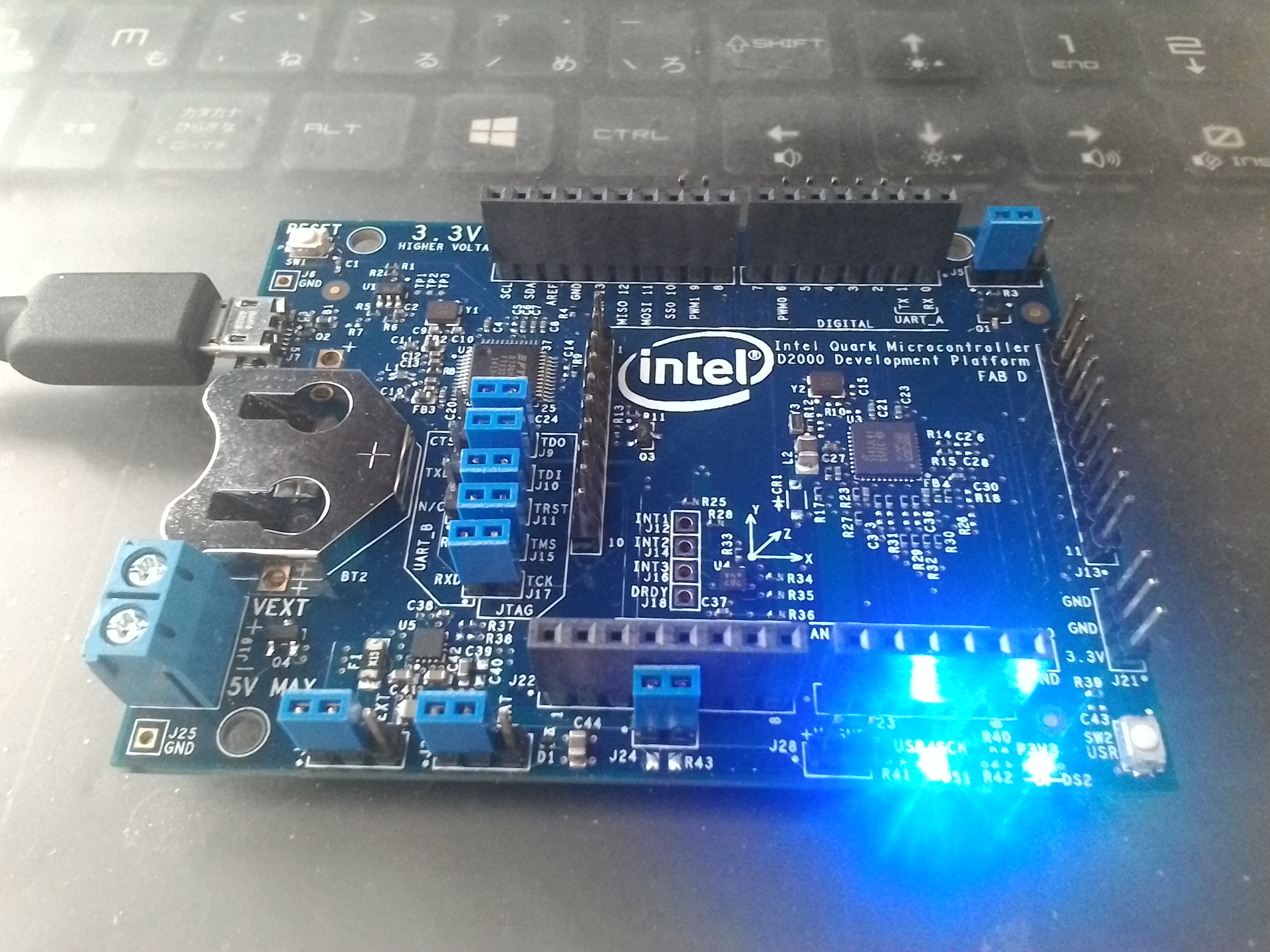
周辺機器は、ライブラリ化されてるので初期化など関数化され
非常に短いコードになっています。
このサンプルでは、OSに関係する関数は、k_sleep()くらいです。
カテゴリー別アーカイブ: Zephyr
Zephyr RTOS Install 2
Ububtuが起動出来たら、LINUXのインストール方法を
Development Environment Setup on Linux
http://docs.zephyrproject.org/getting_started/installation_linux.html#installation-linux
Ubuntu 16.04 LTS 64-bit
を使用した手順でZephyrをインストールします。
まず、Ubuntuをアップグレードします。
$ sudo apt-get update
$ sudo apt-get upgrade
次に開発環境をインストールする。
$ sudo apt-get install –no-install-recommends git cmake ninja-build gperf \
ccache doxygen dfu-util device-tree-compiler \
python3-ply python3-pip python3-setuptools xz-utils file
CMakeのバージョンが3.8.2+ より高い必要があります。以下の
手順でバージョンの確認をします。
$ mkdir $HOME/cmake && cd $HOME/cmake
$ wget https://cmake.org/files/v3.8/cmake-3.8.2-Linux-x86_64.sh
$ yes | sh cmake-3.8.2-Linux-x86_64.sh | cat
$ echo “export PATH=$PWD/cmake-3.8.2-Linux-x86_64/bin:\$PATH” >> $HOME/.zephyrrc
$ source <zephyr git clone location>/zephyr-env.sh
$ cmake –version
次にZephyr Software Development Kitをインストールします。
まずダウンロードします。 Zephyr SDK archiveにダウンロード可能なアーカイブが確認できます。
wget https://github.com/zephyrproject-rtos/meta-zephyr-sdk/releases/download/0.9.2/zephyr-sdk-0.9.2-setup.run
$ sh zephyr-sdk-0.9.2-setup.run
を実行してzephyr-sdkをインストールします。
インストール後、
$ export ZEPHYR_GCC_VARIANT=zephyr
$ export ZEPHYR_SDK_INSTALL_DIR=/opt/zephyr-sdk
※ /opt/zephyr-sdkこの部分は、インストールディレクトリです。
デフォルトがこのディレクトリです。
次にソースコードをインストールします。
$ git clone https://github.com/zephyrproject-rtos/zephyr.git
次にソースをインストールしたフォルダに移動します。
$ cd zephyr
プロジェクト環境変数を設定します。
$ source zephyr-env.sh
次に必要なpythonライブラリをインストールします。
$ pip3 install –user -r scripts/requirements.txt
サンプルプログラムのフォルダに移動します。
cd $ZEPHYR_BASE/samples/hello_world
まずは、qemu向けのビルドをします。
$ make BOARD=qemu_x86
エラーが出なければ成功です。
$ make BOARD=qemu_x86 run
エミュレータ上で実行されます。
Hello Zephyr! Hello World! x86
が表示されました。

以下にサンプルの記載があります。
http://docs.zephyrproject.org/samples/hello_world/README.html
Zephyr RTOS Install 1
IntelのIoT戦略がかわりEdisonが廃止になりました。
AtomとCurieがSoCのラインナップからはずれ、マイコンのQuarkだけが残っています。
Intel Quark? D2000マイクロコントローラ開発キットでは、RTOS Zephyrが使用できるようです。
https://www.zephyrproject.org/
まず、Getting Started Guideをやってみたいと思います。
http://docs.zephyrproject.org/getting_started/getting_started.html
Windows10では、Windows Subsystem for Linuxが使用でき、Ubuntuがインストールできて
そこでZephyrの開発ができるようです。
http://docs.zephyrproject.org/getting_started/installation_win.html
Using Windows 10 WSL (Windows Subsystem for Linux)
この項目に沿って進めました。
https://msdn.microsoft.com/en-us/commandline/wsl/install-win10
まずは、Windows Subsystem for Linuxをインストールします。
管理者権限でPowerShellを開きます。
Enable-WindowsOptionalFeature -Online -FeatureName Microsoft-Windows-Subsystem-Linux
このコマンドを実行します。
その後、再起動します。起動後、 Windows Storeに行き、Ubuntuをインストールします。
https://www.microsoft.com/ja-JP/store/p/ubuntu/9nblggh4msv6?rtc=1
Ubuntuを起動するのには、Windows10の更新が必要な場合があります。
起動すると、ユーザ名とパスワードの入力を求められます。
その後は、普通にUbuntuとして動きます。